")
תוכן עניינים:
- מְחַבֵּר John Day day@howwhatproduce.com.
- Public 2024-01-30 09:14.
- שונה לאחרונה 2025-01-23 14:46.




מוֹטִיבָצִיָה
אני מאוד אוהב תצוגות POV (התמדה בראייה)! הם לא רק מעניינים להסתכל אלא גם אתגר גדול לפתח אותם. זו משימה ממש בינתחומית. אתה צריך הרבה כישורים: מכני, אלקטרוני, תכנות וכן הלאה!
תמיד רציתי לבנות משלי ולהפוך אותו לכמה שיותר גדול ויכול. לפני שנה עשיתי את זה! זו הייתה עבודה רבה ומאוד מורכבת לביצוע. אני אוהב אתגרים כאלה. אז היה כיף;-)
עכשיו אני גם רוצה שתבנה אחד בעצמך. אתה יכול לקחת את זה כמדריך לפיתוח משלך או פשוט לעקוב אחר ההוראות כדי לקבל עותק של תצוגת ה- POV שלי. אנסה להצביע על כל האתגרים שהייתי צריך להתגבר עליהם כדי להפוך את שלי.
חזרתי על העיצוב שלי כדי שיהיה קל יותר לבנות מחדש. אין רכיבי SMT והכל צריך להיות ניתן להלחמה על ידי מתחילים. שלא תבינו לא נכון, זה עדיין אתגר גדול מאוד להרכיב הכל. אבל זה צריך להיות בר ביצוע!
אזהרה: פרויקט זה מכיל נוריות LED המתעדכנות במהירות גבוהה ועשויות לעורר התקפים לאנשים הסובלים מאפילפסיה רגישה
איך זה עובד?
כאן תוכל לקרוא כיצד פועלת תצוגת POV באופן כללי.
ראשית אנו זקוקים למקור המזרים אות וידאו. בעיצוב המקורי עשיתי את זה באמצעות WIFI. כתבתי תוכנית ללכידת מסך המחשב ולשלוח נתונים אלה ל- ESP8266 באמצעות WIFI. הבעיה של גישה זו היא ש- ESP8266 היה איטי מדי ורוחב הפס של WIFI הספיק בדיוק ל -16 FPS. אז עכשיו אנו משתמשים ב- ESP32. חשבתי שכל הבעיות נפתרות, אך התברר ש- ESP32 גם אינו מציע רוחב פס גדול יותר מ- WIFI מאשר ה- ESP8266. ל- ESP32 יש מספיק כוח חישוב כדי לפענח זרם וידאו. אז בסופו של דבר שלחתי תמונות JPEG דרך WIFI ל- ESP32. לכן ה- ESP32 מארח אתר אינטרנט. באתר זה תוכל לבחור תמונות או סרטונים ואז האתר יזרם קובצי JPEG ל- ESP32. פענוח JPEG זקוק לזיכרון רב כך שגם לנו יש בעיה שם. אבל זה עובד כרגע. אולי בהמשך אמצא פתרון טוב יותר.
בשלב הבא עלינו לשלוט בעצמם בנורות הלדים. כדי שזה יעבוד אנחנו צריכים לדעת את המיקום המדויק של הלדים בכל רגע. לכן הוספתי חיישן אפקט הול. בכל סיבוב הוא עובר מגנט ובכך מאפשר את הגילוי. לאחר מכן אנו מודדים את זמן הסיבוב. אנו מניחים שהסיבוב הבא ייקח את אותו הזמן. לכן נוכל לחשב את המיקום שלנו. תהליך זה חוזר על עצמו שוב ושוב. כדי לשלוט בנוריות אנו משתמשים ב- FPGA. נוכל גם להשתמש במעבד אבל זה כנראה יהיה איטי מדי. צריך לרענן את נוריות LED החיצוניות ביותר בסביבות 10.000 פעמים בשנייה. FPGA עומד בקלות במשימה ויעשה זאת עם פחות עצבנים.
אם צריך לעדכן את הלדים לעתים קרובות כל כך, אנחנו צריכים גם נוריות מהירות. בעיצוב המקורי שלי השתמשתי בנורות APA102. יש להם קצב רענון של סביב 20KHz. ניסיתי להשיג פסי LED עם נוריות אלה אך המוכר המקוון שלח לי SK9822s והיה אומר לי שהם זהים (קרה פעמיים …) אז נשתמש ב- SK9822. יש להם רק קצב רענון של 4.7kHz, אבל אני מקווה שזה יספיק. יש להם גם פרוטוקול מעט שונה. רק שים לב. אז ה- ESP32 דוחף את מסגרות התמונה ל- FPGA. ה- FPGA שולט אז בנורות הלדים.
עכשיו הנורות פשוט צריכות להסתובב. לכן אנו משתמשים במנוע DC. מנוע זה נשלט על גבי אות PWM מ- ESP8266. ה- ESP8266 מחובר גם באמצעות WIFI ל- ESP32. לכן אנו זקוקים לחיישן אחד בלבד למדידת מהירות הסיבוב. בעיצוב המקורי השתמשתי בשניים.
מידע נוסף על המערכת ניתן למצוא בסרטון שלי על העיצוב המקורי.
כלים
השתמשתי בכלים הבאים:
- מדפסת תלת מימד
- ברזל הלחמה
- דבק חם
- דבק מגע
- כבל מיקרו USB
- מספריים
- מקדחה + מקדחה עץ 3 4 8 ו -12 מ"מ
- מברג
- צבת שטוחה
- חותך צד
- חשפן חוטים
- חומרי צבע
- נייר זכוכית
להזמין
פתחתי חנות TINDIE. אז אתה יכול לקנות ערכה אם אתה רוצה ולעזור לי לעשות עוד פרויקטים כאלה;-)
OSH
כמו תמיד כל מה שאתה רואה כאן מתפרסם כקוד פתוח.
עדכונים
יש כמה דברים שאני רוצה לשפר בעתיד:
-
רזולוציית צבע גבוהה יותר מ 12 ביט ל 24 ביט => לכן אנו זקוקים ל- FPGA עם יותר RAM =>
Cmod A7, הם תואמים סיכה:-)
- ESP32 עם PSRAM למניעת בעיות זיכרון
- תקן את בעיית המברשת …
אספקה
חלקים בהזמנה אישית
אתה צריך להזמין אותם או להזמין ערכה ממני!
1 * PCB ראשי (קבצי גרבר נמצאים תחת התיקייה gerber main.zip)
1 * PCB מנהל התקן מנוע (קבצי גרבר נמצאים מתחת לתיקייה gerber motor.zip)
4 * פינות 3D 1 הדפסה (קובץ stl נמצא מתחת לתיקייה 3D corner.stl)
1 * מחזיק PCB ראשי 3D 3 הדפסה (קבצי stl נמצאים מתחת לתיקייה 3D holder1.stl, holder2.stl, holder3.stl)
1 * מחזיק מברשות 3D 2 הדפסה (קבצי stl נמצאים מתחת לתיקייה 3D brush1.stl ו- brush2.stl)
חלקים סטנדרטיים
היזהר, חלק מהקישורים כוללים חבילות של 10 או אפילו 100 חלקים.
1m * SK9822 רצועת LED עם 144 LED/m
1 * Cmod S6 FPGA
1 * פיתוח ESP32 של Geekcreit 30 פינים
1 * Geekcreit D1 מיני V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * מנוע DC 775
44 * 100nf 50V
9 * 220uf 16V
10 * מגנט ניאודימיום 10mmx2mm
1 * חיישן אפקט הול
2 * דרמל 4000
2 * מברשות פחמן מוטוריות
2 * מסבים 6803ZZ
2 * מנוע הר 775
2 * שקע DC 5.5 x 2.1 מ מ
1 * ספק כוח
1 * כפתור 8 מ מ
2 * XT30PB תקע זכר ונקבה PCB
2 * כבל XT30 זכר ונקבה
2 * 130Ohm 1/4W נגד
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * כותרת סיכת שורה אחת
1 * כותרת נקבה
1 * כבל 30AWG
1 * כבל 22AWG
חנות לחומרי בניין
1 * MDF 500 מ"מ x 500 מ"מ x 10 מ"מ
1 * MDF 100 מ"מ x 500 מ"מ x 10 מ"מ
4 * MDF 200mm x 510mm x 10mm
1 * זכוכית אקרילית 500 מ"מ על 500 מ"מ x 2 מ"מ
12 * פינת מתכת 40 מ"מ על 40 מ"מ על 40 מ"מ
40 * בורג עץ 3 מ"מ על 10 מ"מ
מרווח 6 * M3 12 מ מ
ברגים M3 ו- M4
3m * כבל 2.5mm2 חוט יחיד/ נוקשה
צבע שחור לעץ MDF
זמן בנייה: ~ 10 שעות
עלות בנייה: ~ 300 €
שלב 1: הורדת קבצים

כדי להתחיל עלינו קודם כל להוריד את כל הדרוש לפרויקט זה.
עבור לדף השחרור של מאגר כאן.
לאחר מכן הורד את Release.zip מהמהדורה האחרונה ופרק אותו במחשב שלך.
בכל פעם שאני מתייחס לקובץ במדריך זה תמצא אותו שם;-)
שלב 2: תוכנת קושחה
שלב 2.1: תכנית FPGA
כדי לתכנת את ה- FPGA עלינו להתקין תוכנה מ- xilinx:
עבור Windows 10 עליך להתקין: ISE Design Suite for Windows 10 (~ 7GB)
עבור Windows 7 או XP ניתן להתקין: Lab Lab (~ 1GB)
לאחר התקנת Open ISE iMPACT ולחץ על "לא" אם תתבקש וגם על "ביטול" לטופס פרוייקט חדש. חבר את FPGA Board Cmod S6 והמתן להתקנת מנהלי ההתקן. לחץ פעמיים על סריקת גבול. לאחר מכן לחץ לחיצה ימנית על החלון החדש ובחר "אתחל שרשרת". לחץ שוב על "לא" וסגור את הטופס החדש. כעת אתה אמור לראות את הסמל "SPI/BPI", לחץ עליו פעמיים. בחר את הקובץ "SPIFlash.mcs". בטופס החדש בחר "SPI PROM" ו- "S25FL128S" ורוחב הנתונים "4". לחץ על "אישור". לאחר מכן לחץ שוב פעם על סמל "FLASH". הוא צריך להיות ירוק עכשיו. לאחר מכן לחץ על "תוכנית". לחץ על "אישור" בטופס החדש והמתן. זה יכול לקחת כמה דקות.
כל הכבוד, ה- FPGA מוכן;-) תוכל לנתק אותו שוב!
שלב 2.2: תכנית ESP32
התקן את הליבה esp32 על מזהה Arduino, תוכל לעקוב אחר הדרכה זו. V1.0.2 מומלץ.
ספריות דרושות:
- AutoPID מאת Ryan Downing V1.0.3 (ניתן להתקנה דרך מנהל הספרייה)
- ArduinoWebsockets מאת גיל מימון, שונה על ידי (הורד את קובץ ה- zip והתקן אותו)
פתח את הקובץ povdisplay.ino בתיקייה povdisplay.
בחר תחת לוח הכלים: "DOIT ESP32 DEVKIT V1". השאר את ההגדרות האחרות כפי שהן.
חבר את לוח ה- esp32 באמצעות USB והורד את התוכנית.
שלב 2.3: תכנית ESP8266
התקן את הליבה ESP8266 על מזהה Arduino, תוכל לעקוב אחר הדרכה זו.
אין צורך בספריות!
פתח את הקובץ motordrive.ino בתיקייה motordrive.
בחר תחת לוח כלים: "מודול כללי של ESP8266". השאר את ההגדרות האחרות כפי שהן.
חבר את לוח ה- esp8266 באמצעות USB והורד את התוכנית.
שלב 3: הלחמות PCB




שלב 3.1 PCB נהג מנוע הלחמה
הרכיבים הבאים מולחמים:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- הלחם את כותרות הסיכה ללוח WEMOS
- הלחם את הכותרות הנשיות על הלוח המודרני
-
DCDC (DC-DC 5V 4A)
- השתמש ב -4 סיכות מהכותרת של הסיכה והלחם את ממיר DC-DC ישירות ללוח
- היזהר מהכיוון, הוא צריך להתאים למסך המשי
- CN1 (שקע DC 5.5 x 2.1 מ"מ)
-
1N5400
היזהר מהכיוון, הקו הלבן בדיודה חייב להיות באותו צד כמו הקו על מסך המשי
-
220u (220uf 16V)
היזהר מהכיוון, הקו הלבן חייב להיות בצד הנגדי של פלוס במסך המשי
- R1 ו- R1 (התנגדות של 130Ohm 1/4W)
-
Q1 ו- Q2 (MOSFET IRF3708PBF)
היזהר מהכיוון, גב המתכת חייב להיות בצד עם הקו העבה על מסך המשי
-
MOTOR (תקע PCB נקבה XT30PB)
היזהר מהכיוון, הקצה העגול חייב להיות בצד המסומן על מסך המשי
-
נוריות וטייסטר (תקע XT30PB זכר PCB)
היזהר מהכיוון, הקצה העגול חייב להיות בצד המסומן על מסך המשי
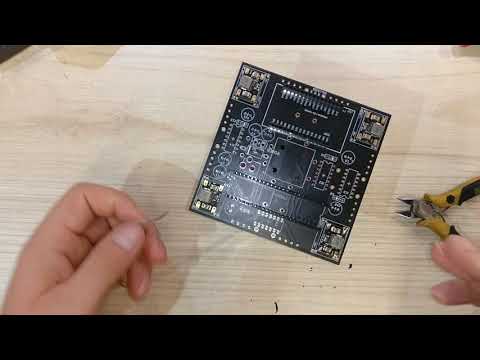
שלב 3.2 הלחמה הראשית של הלחמה
הרכיבים הבאים מולחמים:
-
CMODS6 (Cmod S6 FPGA)
יש לכלול כותרות סיכה. הלחם אותם על ה- PCB
-
ESP (פיתוח Geekcreit 30 פינים ל- ESP32)
השתמש בכותרות נקביות והלחם אותן על הלוח המודרני
-
DCDC1 - DCDC4 (DC -DC 5V 4A)
- השתמש ב -4 סיכות מכותרת הסיכה והלחם את ממיר DC-DC ישירות ללוח
- היזהר מהכיוון, הוא צריך להתאים למסך המשי
- POWER_TEST (שקע DC 5.5 x 2.1 מ"מ)
-
D1 (1N5400)
היזהר מהכיוון, הקו הלבן בדיודה חייב להיות באותו צד כמו הקו על מסך המשי
-
POWER (תקע PCB נקבה XT30PB)
היזהר מהכיוון, הקצה העגול חייב להיות בצד המסומן על מסך המשי
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
היזהר מהכיוון, הקו הלבן בקבל חייב להיות בצד הנגדי של הפלוס על מסך המשי
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
היו זהירים כדי ליישר את החיתוך של ה- IC עם הסימון על מסך המשי
שלב 3.3 דבק חם
הלוח הראשי יסתובב מהר מאוד. אז עלינו להדביק את הקבלים (C1, C3, C4, C6, C7, C9, C10, C11) על הלוח כדי למנוע בעיה. פשוט השתמש בדבק חם בשביל זה.
שלב 4: הכינו רצועות




שלב 4.1 חותכים את הרצועה לחתיכות
הסר את הגנת המים בעזרת מספריים.
אנו זקוקים לארבעה כנפיים וכל אגף מכיל ארבע קבוצות. כנף אחת מיוחדת, יש לה יותר LED מהאחרים.
כנף 1:
- G1: 5 נוריות (רוב הקבוצה החיצונית)
- G2: 6 נוריות LED
- G3: 8 נוריות LED
- G4: 14 נוריות LED
WING2 - WING4:
- G1: 5 נוריות (רוב הקבוצה החיצונית)
- G2: 6 נוריות LED
- G3: 8 נוריות LED
- G4: 13 נוריות LED
לכן אנו זקוקים ל -129 נוריות LED ולרצועה שלנו יש 144 כך שיש לנו איזו סובלנות לחיתוך שגוי;-) במקרה הגרוע ביותר ניתן להלחם את החיתוך.
חותכים כמה שיותר מרוכזים בין הלדים.
שלב 4.2 כבלי הלחמה לרצועת ה- LED
בכל אחד מקטעי רצועות הלד הלחמה שני חוטי 30AWG בשעון ובסיכת הנתונים. אלה שני הסיכות באמצע. היזהר להלחם אותם על קלט רצועת ה- LED. בדרך כלל, החצים מראים את כיוון זרימת הנתונים. אורכם של הכבלים יהיה כחצי מטר
גזור הכל מהצד השני של הסטריפטיו הימנע מקצר בין נתונים לסיכות השעון של הקבוצות השונות כאשר אנו מרכיבים את כנפי האחד.
שלב 4.3 קבלים הלחמה
על כל הלחמה קבוצתית שני קבלים (100nf 50V) בחלק האחורי של מקטעי רצועות הלד בכל קצה. עבור G4 גם הלחמה אחת באמצע. הכבלים צריכים להיכנס מתחת לקבלים כדי להשאיר קצת מקום אבל לא יותר מדי.
שלב 4.4 חבר את הכנפיים יחד
עבור כל כנף להוביל את החוטים מ G1 עד G2 ולאחר מכן חוטים אלה דרך G3 ואותו הדבר עם G4.
שלב 4.4 הלחמה של הקבוצות יחד
עכשיו אנחנו צריכים את כבל הנחושת (כבל 2.5mm2 חוט יחיד/נוקשה). חותכים אותו לשמונה חתיכות באורך של כ -30 ס מ. הפשיטו את הבידוד של כל החוטים. יישר את הכבלים עד כמה שניתן. אתה יכול לתקן קצה אחד במהדק בורג ולהחזיק את השני עם צבת שטוחה ולאחר מכן להכות את הצבת בפטיש.
תקן את הכבל בצד אחד כדי להקל על העבודה איתו. ואז הלחמה אליו את הקבוצה הראשונה. יישר את קטע רצועת ה- LED עם הכבל והלחם אותו בצד אחד לשני הקבלים. הכבל צריך להיות מונח שטוח על רצועת ה- LED. המשך עם הקבוצה הבאה. היזהר כי המרחק בין שתי קבוצות LED הוא גם 7 מ מ. בסופו של דבר לכל הלדים צריך להיות אותו פער ביניהם. המשך עם שתי הקבוצות האחרות. על הלחמה הקבוצה האחרונה כל שלושת הקבלים לחוט.
לאחר מכן חתכו את הכבל בסוף. המשך עם כבל נוסף בצד השני של הרצועה.
עכשיו נגמר האגף הראשון! עשו את אותו הדבר עבור שלושת הכנפיים האחרות.
שלב 4.5 כופפו את הקבלים
פשוט כופפו את כולם כדי שהרצועות יהיו דקות.
שלב 5: הלחמת הרצועות על הלוח הראשי




שלב 5.1 בדוק את הקיטוב
ראשית עלינו לדעת את הקיטוב של רצועת ה- LED. במילים אחרות: כאשר 5V וקרקע הם יחסית ל- PCB. זה באמת תלוי ברצועת ה- LED שיש לך ויכול להיות בכל דרך.
החזק כנף אחת על הלוח הראשי. החצים ברצועת LED חייבים להצביע על מרכז הלוח. עכשיו תראה אם 5V נמצא ב DATA או בצד השעון של הסיכות.
אם 5V נמצא בצד DATA אתה טוב ואתה יכול להשתמש בנחושת 2.5 מ מ כדי להלחם את רצועת ה- LED ישירות אל הלוח הלוח.
אם לא, עליך להשתמש בכבל 22AWG כדי לחצות את שני הצדדים. לכן, הלחם את הכבל לרצועת ה- LED והצלב את הצד השמאלי והימני והלחם אותו אל ה- PCB.
שלב 5.2 כבל הלחמה 2.5 מ"מ
השתמש בשאר כבל הנחושת בגודל 2.5 מ"מ ופשט הכל. הלחם אותם בצד העליון של הלוח המודרני. חותכים את החוט המולחם באותו גובה בסביבות 1 ס"מ.
שלב 5.3 הלחמה של הכנף הראשונה
השתמש בכנף הארוכה יותר והנח אותו על הלוח (נוריות 1) כפי שמוצג על מסך המשי. הלחם אותו לחוטים 2.5 מ מ. צור קשרים ממש חזקים זה יראה הרבה כוח במהלך הסיבוב! לאחר מכן חבר את הכבלים של קבוצה 1 לנתוני G1 ולשעון G1.
אל תשכח להלחם את חיבור החשמל כמתואר לעיל.
חבר את ESP32 ו- FPGA (48 ו -1 בצד המסומן) והפעל את הלוח באמצעות ספק הכוח.
נוריות הלוח החיצוניות ביותר אמורות להבהב כחול כעת (יכול לקחת עד 40 שניות לעשות זאת). אם לא, בדוק אם חיברת את השעון והנתונים בדרך הנכונה.
שלב 5.4 חיישן אפקט אולם
הלחמה כותרת סיכה נקבה (עם שלוש סיכות) לאולם. מאוחר יותר נחבר אליו את החיישן.
הלחם את החיישן (חיישן אפקט הול) לכותרת סיכה גברית. הקישורים עם הסניור וכותרת הסיכה צריכים להיות בסביבות 25 מ מ.
שלב 5.5 המשך עם שאר הכנפיים
עבור LEDs2 - LEDs4 == WING2 - WING4 עושים את אותו תהליך כמו עם WING1.
מדי פעם הפעל את ה- PCB ובדוק אם הכל מהבהב. הדפוס מתחיל עם הלד החיצוני ביותר ונכנס פנימה ומתחיל מחדש.
שלב 5.6 איזון
נסה לאזן את ה- PCB הראשי באמצע עם אובייקט מחודד. אם צד אחד שוקל יותר, נסה להוסיף הלחמה לצד השני. זה לא חייב להיות מושלם, אבל יותר מדי חוסר איזון יביא בהמשך לרטט רב במהלך הפעולה, מה שעלול להוביל לבעיות מכניות.
שלב 6: צביעה ראשונה

שלב 6.1: מקדחה
עלינו לקדוח כמה חורים:
על לוח MDF 500*500 אנו זקוקים לשני חורים. עיין בקובץ drill_wood_500_500.pdf וקדוח את החורים בהתאם לתוכנית.
על לוח MDF 500*100 אנו זקוקים להרבה חורים. לכן הדפס את הקובץ drill_wood_500_100_A4.pdf ויישר אותו על הלוח. פשוט לקדוח במקום בו החורים מסומנים על הנייר.
שלב 6.2: צבע
צובעים צד אחד של כל עץ. ללוח ה- 500 x 500 MDF זה הצד שקידחת עליו.
צובעים את שני הצדדים של העץ 100x500.
ניתן גם לצבוע את פינות המתכת בשחור. זה ייראה טוב יותר;-)
את השאר נצבע כאשר נרכיב את הכל (החלק החיצוני של הקופסה).
שלב 7: הרכבה מכנית

שלב 7.1 הרכיבו את לוח ההדפסים של מנהל התקן המנוע
הלוח המודפס מותקן על לוח MDF 100 x 500. השתמשו ברווחי המרווח (מרווח M3 12 מ מ) ובכמה ברגים ואומים m3.
שלב 7.2 הרכיב סוגריים
הרכיב את שני הסוגריים (מנוע הר 775) על לוח MDF 100 x500 בעזרת ברגי M4.
שלב 7.3 הכנת מחזיק
יש להשבית את שני המחסומים (מסבים 6803ZZ). אנחנו רק צריכים את שתי הטבעות החיצוניות ממנה.
חוטי הלחמה 22AWG על כל אחד מהטבעת. אחד שחור ואחד אדום.
קח את מחזיקי החלקים המודפסים בתלת מימד והרכיב אותם.
הכנס את כל שבעת האומים M3 לחורים המתאימים והחלק את הטבעת עם החוט האדום תחילה על המחזיק, לאחר מכן את המרווח ולאחר מכן את הטבעת עם החוט השחור. הוסף את החלק השלישי למעלה והכנס את הברגים.
חותכים את שני החוטים במרחק של 2 ס מ ומלחמים אליו את הג'ק (כבל זכר XT30). הכבל השחור עובר לצד המעוקל.
שלב 7.4 הר מנוע
הברג את המנוע (מנוע DC 775) לתושבת המנוע באמצע לוח 100x500 MDF.
הרכיב את המחזיק על המנוע והברג אותו היטב.
שלב 7.5 התקן מברשות
תכננתי להשתמש במברשת Dremel (מברשות קרבון Dremel 4000). אנחנו צריכים להשתמש בפחם אחר (מברשות פחמן מוטוריות) מכיוון שלפחם למברשות Dremel יש עמידות גבוהה מדי. התעלמתי מכך בתהליך הפיתוח. אז אנו משתמשים במברשות המנוע ומשייפים אותן בגודל של מברשות הדרמל.
חותכים את החוט ממברשת המנוע במרחק של 5 מ מ מהפחם.
לאחר מכן אנו משתמשים בנייר חול כדי לחתוך את הפחם למידות הבאות: 8.4 x 6.3 x 4.8 מ מ
צד אחד של מברשת המנוע הוא 6.1 מ מ, ולכן עלינו לשייף רק שני צדדים.
אתה יכול לנסות אם הוא מחליק בקלות למחזיק המברשות, אז זה בסדר.
נסה גם לשייף עקומה בחלקו העליון כדי לשפר את החיבור לטבעות המתכת.
הלחמה חוט 22AWG בפחם לשני הגחלים. השתמש בחוט אדום ושחור. הכנס את הקפיץ ממברשת הדרמל.
הכנס את המברשות למחזיק המברשות. המברשת עם החוט האדום נכנסת למעלה. הצד העליון של המחזיק מעט עבה יותר. היזהר ששני המעיינות לא יגעו זה בזה.
הרכיבו את המחזיק לבסיס בעזרת אגוזים וברגי m3.
הרכיב את בסיס מחזיק המברשות לתושבת המנוע השני. השתמש בברגים ואומים M4 המצורפים לתושבת.
המנוע אמור להיות מסוגל להסתובב בחופשיות.
הנח את שני החוטים בין שני הסוגריים.
חותכים את שני החוטים באורך כך שהם פשוט יכולים להגיע ללוח הלוח וללחם אליו את הזבל (כבל זכר XT30 Plug).הכבל השחור עובר לצד המעוקל.
הלחם שני חוטי 22AWG למנועים וחתך אותם למרחק כדי להגיע בקלות ל- PCB ולהלחם אליו את הזבל (כבל נקבה XT30). הכבל השחור עובר לצד המעוקל.
שלב 8: סיים
מוּמלָץ:
תצוגת שעון תצוגת LED עם מטריקס LED בשליטת WiFi: 3 שלבים (עם תמונות)
")
תאורת שעון תצוגת מטריצת תצוגת LED מבוקרת באמצעות WiFi: רצועות LED הניתנות לתכנות, למשל מבוסס על WS2812, מרתקים. יישומים הם רבים ואתה יכול להשיג תוצאות מרשימות במהירות. ואיכשהו בניית שעונים היא תחום אחר שאני חושב עליו הרבה. מתחיל עם קצת ניסיון בתחום
כיצד להכין תצוגת POV מאוורר: 6 שלבים (עם תמונות)
")
כיצד להכין תצוגת POV מאוורר: בפרויקט זה אראה לך כיצד הפכתי מאוורר ישן רגיל לתצוגת POV LED אשר יכולה להציג בפניך דפוסי אור, מילים או אפילו את הזמן. בואו נתחיל
תצוגת POV Horisontal POV של ארדואינו: 3 שלבים

תצוגת POV Horisontal POV: תצוגת POV פשוטה ביותר עם 5LED ו- Arduino Nano
PropHelix - תצוגת POV בתלת מימד: 8 שלבים (עם תמונות)
")
PropHelix - תצוגת 3D POV: אנשים תמיד היו מוקסמים מיצוגים הולוגרפיים. ישנן מספר דרכים לעשות זאת. בפרויקט שלי אני משתמש בסליל מסתובב של פסי LED. ישנם בסך הכל 144 נוריות LED שיכולות להציג 17280 ווקסלים עם 16 צבעים. הווקסלים הם עררה
תצוגת וידיאו מותקנת במשקפיים לעין אחת - הפוך את עצמך לבורג: 12 שלבים

תצוגת וידיאו מותקנת במשקפיים לעין אחת-הפוך את עצמך לבורג: עדכון 15 במרץ 2013: יש לי גרסה חדשה יותר טובה יותר של זה כעת במדריך אחר: https: //www.instructables.com/id/DIY-Google-Glasses .. תאמינו או לא המטרה האמיתית של הפרויקט הזה היא לא לשחק בבורג. הייתי צריך לעשות קצת