")
תוכן עניינים:
- שלב 1: חלק הדפסה והרכבה
- שלב 2: בסיס חדש
- שלב 3: תיקון קטן
- שלב 4: PCB תוצרת בית
- שלב 5: תחריט PCB
- שלב 6: כרסום PCB
- שלב 7: כרסום PCB: קבל קובץ לייצור
- שלב 8: PCB כרסום: תהליך הטחינה
- שלב 9: כרסום PCB: נקו את העבודה
- שלב 10: הלחמת הרכיב
- שלב 11: קושחה ותוכנה
- שלב 12: בדיקה
- שלב 13: המשך בהרכבה
- שלב 14: כיול
- שלב 15: מבחן מנדרינית ראשון
- שלב 16: תודה
- מְחַבֵּר John Day day@howwhatproduce.com.
- Public 2024-01-30 09:16.
- שונה לאחרונה 2025-01-23 14:46.


שלום לכולם, אני עומד לממש את סורק התלת מימד המפורסם של סיקלופ.
כל השלב שמוסבר היטב בפרויקט המקורי אינו קיים.
עשיתי תיקון כלשהו כדי לפשט את התהליך, קודם כל אני מדפיס את הבסיס, ולאחר מכן אני מסדר מחדש את ה- PCB, אבל ממשיך.
שלב 1: חלק הדפסה והרכבה
עבור חלק הרכבה הפתרון הטוב ביותר הוא להתייחס לתיעוד אוריג'ינה
www.bq.com/it/support/ciclop/support-sheet
ברב לשונות והסבר טוב.
החלק המודפס די פשוט להרכבה.
יש גם הרבה סרטונים, הרשמי הוא זה.
שלב 2: בסיס חדש


היצירה היחידה שקשה למצוא היא בסיס הפרספקס, אז אני מעצב פריט להדפסה בעזרת מדפסת תלת מימד Anet A8 שלי.
אתה יכול למצוא את הפרויקט כאן.
שלב 3: תיקון קטן


בעיה נוספת היא שאתה כנראה יכול למצוא לייזר בעלות נמוכה שאינו מתאים למחזיק המקורי.
הלייזר הנפוץ הוא לייזר 12 מ מ.
אז אתה יכול להשתמש בגרסה מודפסת זו.
בעיה נוספת היא לעצור את החלק המסתובב, אני חושב שהפתרון הטוב יותר הוא להשתמש בגומייה, כפי שניתן לראות בתמונות.
שלב 4: PCB תוצרת בית

עבור פרוייקט זה הכנתי PCB תואם במלואו לסריקת Zum המקורית מורכבת יותר, אך כל התכונות הנוספות אינן בשימוש.
הגרסה שלי מיועדת ל- Arduino Nano, כך שהיא קטנה יותר מהגרסה המקורית.
אם אין לך את היכולת לייצר אוטומטית PCB אתה יכול להשתמש בקובץ gerber שתוכל למצוא במאמר שישלח למפעל המייצר PCB כמו
שלב 5: תחריט PCB
מעולם לא השתמשתי בטכניקה זו, אך אני מוסיף לשלב זה את קובץ ה- SVG או ה- PDF לייצור.
שלב 6: כרסום PCB
אני משתמש בטכניקה זו לייצור אישי שלי, על כך אני כותב 2 מאמר:
הראשון הוא מדריך צעד אחר צעד ליצירת CNC נייד מושלם ומוטב עבור כרסום CNC.
הנה המדריך.
מאשר מדריך קודם המסביר צעד אחר צעד כיצד להשתמש במכונה, כיצד ליצור PCB וכיצד ליצור קובץ לייצור.
הנה המדריך השני.
שלב 7: כרסום PCB: קבל קובץ לייצור
אני מוסיף כאן את הקובץ לייצור, הגרבר או ישירות את ה- gcode למכונת הטחינה
שלב 8: PCB כרסום: תהליך הטחינה



טוחנים תחילה את תחתית הנחושת, ואז מקדחים את החור.
שלב 9: כרסום PCB: נקו את העבודה


מאשר להשתמש בנייר חול כדי להפוך את הלוח שטוח ונקי.
שלב 10: הלחמת הרכיב



ללוח זה אני משתמש ב:
- ארדואינו ננו
- נהג צעדים A4988
- נגד 2x 1k
- נגד 10k
- 2 טרנזיסטור 2n2222
- 5.5 חבית למתח כניסה
אני משתמש באספקת חשמל 12V 2A (לחבית) כדי להפעיל נהג צעד.
מחבר ה- USB מספיק ללייזר ולארדואינו.
שלב 11: קושחה ותוכנה

אתה יכול להוריד את הקושחה להעלאה ל- Arduino מכאן
github.com/bqlabs/horus-fw
כמתואר במדריך המצלמה היא מצלמת רשת Logitech C270 HD, הנהג כאן.
support.logitech.com/en_ca/product/hd-webca…
תוכנה תוכל למצוא כאן.
horus.readthedocs.io/en/release-0.2/
אם אתה מתקשה להוריד אתה יכול ללכת לכאן
github.com/LibreScanner/horus/releases
שלב 12: בדיקה

ראשית אני בודק הכל ללא מצלמה, וזה עובד טוב.
אתה יכול להשתמש בקובץ ino כדי לבדוק לייזר וסטפר
שלב 13: המשך בהרכבה


לאחר מכן אני מוסיף מצלמה, מסדר לוח ומוסיף נייר שחור בחלקו העליון של הרציף.
שלב 14: כיול
יש הרבה סרטונים על כיול, שלב זה פשוט מאוד.
אני מבין את הסרטון המינימלי הזה עם הציקלופ החדש שלי.
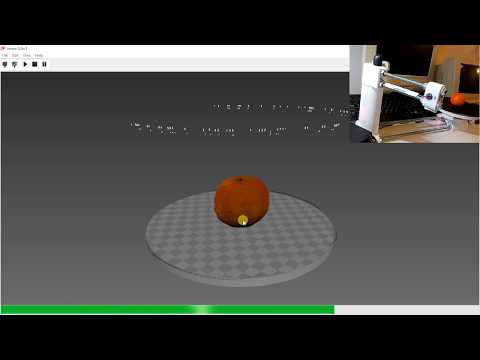
שלב 15: מבחן מנדרינית ראשון
בסרטון זה אני רק סורק את האובייקט, אך כדי לקבל תמונה טובה עליך לבצע עיבוד פוסט אחר עם תוכנה כמו MeshLab.
שלב 16: תודה
עכשיו התחל לסרוק הכל.
מוּמלָץ:
סורק תלת מימד בסיסי למיפוי תלת מימד דיגיטלי: 5 שלבים

סורק תלת מימד בסיסי למיפוי תלת מימד דיגיטלי: בפרויקט זה אתאר ויסביר את היסודות הבסיסיים של סריקה ושחזור תלת מימד החלים בעיקר על סריקה של אובייקטים קטנים של מטוסים למחצה, ואשר ניתן להרחיב את פעולתם למערכות סריקה ושחזור שיכולות ב
מנוע צעד מבוקר צעד מנוע - מנוע צעד כמקודד סיבובי: 11 שלבים (עם תמונות)
")
מנוע צעד מבוקר צעד מנוע | מנוע צעד כמקודד סיבובי: האם כמה מנועי צעד שוכבים ורוצים לעשות משהו? במדריך זה, בואו להשתמש במנוע צעד כמקודד סיבובי כדי לשלוט במיקום מנוע צעד אחר באמצעות מיקרו -בקר Arduino. אז בלי להתבטא יותר, בואו נגיד
מעטפת חום למדפסת תלת מימד: תקן עיוות בהדפסות תלת מימד: 4 שלבים

מעטפת חום למדפסת תלת מימד: תיקון עיוות בהדפסות תלת מימד: כל מי שהיה לו מדפסת תלת מימד נתקל בשלב זה או אחר בבעיית העיוות. הדפסים שלוקחים שעות בסופו של דבר נהרסים בגלל שהבסיס התקלף מהמיטה. נושא זה יכול להיות מתסכל ולוקח זמן. אז מה בעצם
סורק CT ושולחן תלת מימד עם Arduino: 12 שלבים (עם תמונות)
")
סורק מחשב שולחני וסורק תלת מימד עם Arduino: טומוגרפיה ממוחשבת (CT) או טומוגרפיה צירית ממוחשבת (CAT) קשורה לרוב בהדמיה של הגוף מכיוון שהיא מאפשרת לרופאים לראות את המבנה האנטומי בתוך המטופל מבלי לבצע כל ניתוח. לתמונה בתוך האדם האנושי
סורק תלת מימד DIY מבוסס על אור מובנה וחזון סטריאו בשפת פייתון: 6 שלבים (עם תמונות)
")
סורק תלת מימד DIY מבוסס על אור מובנה וחזון סטריאו בשפת פייתון: סורק תלת מימד זה נעשה באמצעות פריטים קונבנציונאליים בעלות נמוכה כמו מקרן וידיאו ומצלמות רשת. סורק תלת-ממד בעל מבנה אור הוא מכשיר סריקה תלת-ממדי למדידת הצורה התלת-ממדית של אובייקט באמצעות דפוסי אור מוקרנים ומערכות מצלמה