")
תוכן עניינים:
- מְחַבֵּר John Day day@howwhatproduce.com.
- Public 2024-01-30 09:12.
- שונה לאחרונה 2025-01-23 14:46.




אופי קוד פתוח באמת של אוטו מאפשר חינוך פתוח ב- STEAM, אנו אוספים משוב מסדנאות ובתי ספר שונים ברחבי העולם שכבר משתמשים ב- Otto DIY בכיתה שלהם ובהתאם לפתיחות של מקומות חינוכיים אלה אנו מארגנים את חומר השיעור ומשתפים גם אותם.
רישיון CC-BY-SA Creative commons פירושו שאתה יכול להעתיק בחינם אך עליך לתת קרדיט למקור על ידי הצבת האתר שלנו (https://www.ottodiy.com/)
Otto DIY + היא הגרסה המשופרת והמתקדמת של #OttoDIY המקורית, הרעיון הוא שיהיו אותם תכונות בסיסיות של רובוט DIY + שליטה ותכנות בלוטות ' + מנועי סרוו מתכת + נטענת + מצבי שינוי על ידי חיישן מגע + חיישן צליל + תנועות אור + יציאות אחרות +…?
החלק המרגש הוא שאנחנו עושים פיתוח פתוח עם יצרנים והאקרים ברחבי העולם, כך שאנו פתוחים לרעיונות, לא רק ממומחים שאפשר להצטרף אליהם, משוב, שיתוף חברתי, בדיקות או כל תרומה אחרת שאפשר לחשוב עליה.
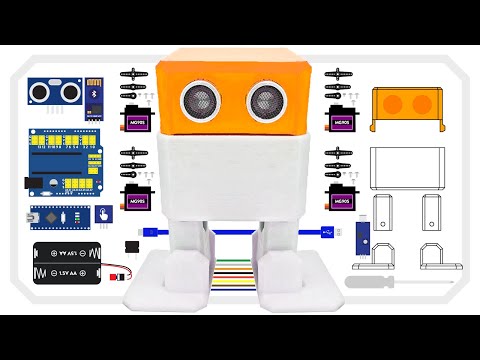
אספקה
1 × ארדואינו ננו
1 × מודול בלוטות 'HC-06 או HC-05
1 × Arduino Nano Shield I/O; אתה יכול להשתמש בלוח לחם מיני אבל הרבה יותר עבודת כבלים
1 × כבל USB-A למיני USB
4 × מיקרו סרוו MG90s (מתכת)
1 × זמזם
10 × חוטי מגשר נקבה/נקבה
1 × חיישן מגע
1 × חיישן קול
1 × 8x8 מ מ מיקרו מתג נעילה עצמית הפעלה/כיבוי
1 × 3.7 V סוללת LiPo עם מגבר עד 5V (אופציונלי) 1 × מברג פיליפס 1 x מדפסת תלת מימד (או השתמש בשירות או בחבר;))
שלב 1: הגדרות מדפסת תלת מימד

חשוב לקרוא את ההוראות הקודמות של אוטו עשה זאת בעצמך כדי להכיר את היסודות של בניית רובוט דו-צדדי קבל את כל חלקי STL, הקודים והספריות בהדפסה תלת-ממדית עבור Bluetooth על ידי מעבר לכאן https://wikifactory.com/+OttoDIY/otto-diy- פלוס בכרטיסייה קבצים
- ממליץ להשתמש במדפסת 3D FDM עם חומר PLA.
- אין צורך תומכים או רפסודות כלל.
- רזולוציה: 0.15 מ"מ
- צפיפות מילוי 20%
צריך להתאים את הגודל כמה שינויים השתמש בקובץ המקור שנוצר ב- Autodesk Fusion 360
או Tinkercad כאן
שלב 2: בנה Otto DIY משלך



בסרטון ובתמונות הבאות תוכל לקבל התייחסות כיצד לבנות Otto DIY+, בשל כמה גרסאות חדשות של עיצוב הרובוט.
שלב 3: קוד את אוטו שלך





אז עד לנקודה זו עליך להדפיס, להרכיב, תלת מימד של אוטו תלת -ממדי, כעת מעט תוכנות שיותקנו במחשב שלך ספריות וארדואינו.
הכי קל לקודד את אוטו שלך הוא באמצעות תוכנת Blockly שלנו, קודן מתקדם יותר יכול לנסות Arduino IDE ישירות.
שלב 4: קוד ראשי עבור אפליקציית Bluetooth




אוטו צריך להיות מוכן לקבל פקודה באמצעות בלוטות 'ולשם כך צריך להכניס את הקוד הראשי למוחו
- העתק את ספריות אוטו לתיקיית Arduino IDE
- העלה סקיצה APIN.ino לאוטוטו
- הורד והתקן את האפליקציה בסמארטפון שלך. חנות Google Play (https://play.google.com/store/apps/details?id=com.ottodiy)
- כעת תוכל לחבר את המודול ולהפעיל Bluetooth בטלפון שלך.
- מצא את אוטו והתאם את כתובת /שם ה- Bluetooth
- עכשיו אתה יכול להשתמש באפליקציה כדי לשלוט באוטו!
- שחק עם התכונות החדשות ואם לא, ייתכן שתצטרך להגדיר מחדש את ה- BT שלך אבל אל תדאג זה גם קל;)
שלב 5: העתק, הרחב, התאם אישית, שנה, רמיקס ושתף




בדוק פוסט זה בבלוג כדי למצוא רעיונות כיצד להתאים אישית את הרובוט שלך
הצטרף לקהילת אוטו בונה! עקוב אחרינו, תן לנו לייק ושתף את היצירתיות שלך, תוכל להופיע כאן על ידי שיתוף הרובוט שלך בכל מדיה חברתית
פייסבוק ואינסטגרם
השתמש בהאשטאג #ottodiy בפוסט שלך ותייג או ציין @OttoDIY
היה חלק מהקהילה הידידותית הזו של בוני רובוטים, מורים ויוצרים! על ידי הצטרפותנו לכאן ברוכים הבאים לקהילת אוטו בונה שלנו!
שלב 6: הגדרת Bluetooth (BT) (רק אם ההתאמה לא הצליחה):
התקנה זו נחוצה רק למודולים שאינם מגיעים עם קצב שידור סטנדרטי של 9600, כיצד ניתן לדעת? נסה קודם כל את הקוד ואת האפליקציה, אם הטלפון אינו משתייך עם אוטו או מגיב לפקודות, אז כנראה שהמודול שלך נמצא בקצב שידור שונה ולכן עליך להגדיר אותו
קוד BT כולל 115200 קצב שידור, כך שמודול BT חייב להתאים למהירות זו כדי להיות מסוגל לתקשר עם Arduino Nano באמצעות ממשק סידורי (UART).
עבור HC-05: 38400 או 115200
1. העלה תחילה את הסקיצה HC05_BT_config.ino ל- Nano שלך, ולאחר מכן נתק את Nano מה- USB.
2. כעת חבר את BT ל- Arduino Nano כפי שמוצג בתרשים אך אל תחבר VCC.
TX - RX
RX - TX
VCC - 5V
GND - GND
3. חבר את ה- USB ל- Nano ולאחר מכן חבר את VCC כך BT נכנס למצב AT. נורית LED על BT צריכה להתחיל למצמץ לאט יותר, בערך אחת לשתי שניות. (אם זה לא עובד, נסה להחזיק את הכפתור במודול BT בעת חיבור VCC).
פתח צג סדרתי ב- IDE, הגדר את קצב השידור ל- 9600 והקו מסתיים ל- NL & CR.
הקלד AT ואז הקש enter; (אם הכל בסדר, BT צריכה להגיב עם אישור ולאחר מכן להזין את הפקודות הבאות:
AT+NAME = Zowi "הגדרת השם"
AT+PSWD = 1234 "סיסמת התאמה"
AT+UART = 115200, 1, 0 "קצב שידור"
AT+POLAR = 1, 0 "מאפשר סיכת STATE לשמש לאיפוס לתכנות ארדואינו מעל BT"
כעת עבור לשלב האפליקציה
אם יש בעיה, בדוק את ההנחיות כיצד לשנות את ברירות המחדל של מודול בלוטות 'HC-05 באמצעות פקודות AT
www.instructables.com/id/Modify-The-HC-05-…
עבור HC-06: 9600 או 115200
עבור מודול HC-06 BT הדברים קצת יותר פשוטים מכיוון שהמודול תמיד נמצא במצב פקודה AT כאשר הוא אינו מחובר לשום דבר. אבל החיסרון הוא שלא ניתן להשתמש במודול HC-06 להעלאת סקיצות ל- Arduino מכיוון שאין בו איפוס. להגדרת המודול
1. העלה את המערכון הזה HC06_BT_config.ino ל- Nano שלך
1. נתק את ה- USB
2. חבר מודול BT ל- Arduino Nano כך:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. הפעל את ה- Nano שלך ולאחר כ-10-15 שניות הכל צריך להסתיים ולהגדיר את ה- BT שלך (LED13 צריך להתחיל להבהב).
אם יש בעיה, בדוק את https://www.instructables.com/id/Tutorial-Using-HC… להנחיה זו.
אם יש לך שאלה, אני לא מקבל הודעות על ידי תגובות חדשות להוראה, אז אם יש משהו אנא פרסם בקהילה שלנו
מוּמלָץ:
צור רובוט רוקד ללא מדפסת תלת מימד ו Arduino/#smartcreativity: 11 שלבים (עם תמונות)
")
הכינו רובוט רוקד ללא מדפסת תלת מימד ו Arduino/#smartcreativity: שלום חברים, במדריך זה אראה לכם כיצד להכין רובוט רוקד בבית ללא מדפסת תלת מימד וללא ארדואינו. הרובוט הזה מסוגל לרקוד, איזון אוטומטי, הפקת מוזיקה והליכה. וגם העיצוב של הרובוט נראה כל כך מגניב
טיטו - רובוט מודפס תלת מימד Arduino UNO: 7 שלבים (עם תמונות)
")
טיטו - רובוט מודפס תלת -ממדי של Arduino UNO: טיטו הוא רובוט DIY לרקוד דו -צדדי, נגזרת מזובי ובוב, בעצם הותאם ללוח UND רגיל של Arduino עם חיבורים ותמיכה קלים יותר. זה היה האיטרציה הראשונה ל- Otto DIY (www.ottodiy.com)
כיצד ליצור רובוט מבודד מרחוק תלת-ממד עם איזון עצמי: 9 שלבים (עם תמונות)
")
כיצד ליצור רובוט מבודד מרחוק תלת-ממד המודפס באופן עצמאי: זוהי אבולוציה של הגרסה הקודמת של רובוט B. 100% מקור פתוח / רובוט ארדואינו. ה- CODE, חלקי התלת -ממד והאלקטרוניקה פתוחים, אז אל תהסס לשנות אותו או ליצור גרסה ענקית של הרובוט. אם יש לך ספקות, רעיונות או זקוק לעזרה, צור
רובוט איזון / רובוט 3 גלגלים / רובוט STEM: 8 שלבים

רובוט איזון / רובוט 3 גלגלים / רובוט STEM: בנינו רובוט איזון משולב ושלושה גלגלים לשימוש חינוכי בבתי ספר ובתוכניות חינוכיות לאחר הלימודים. הרובוט מבוסס על Arduino Uno, מגן מותאם אישית (כל פרטי הבנייה מסופקים), חבילת סוללות לי יון (כל מבנה
[רובוט ארדואינו] כיצד ליצור רובוט לכידת תנועה - רובוט אגודל - מנוע סרוו - קוד מקור: 26 שלבים (עם תמונות)
![[רובוט ארדואינו] כיצד ליצור רובוט לכידת תנועה - רובוט אגודל - מנוע סרוו - קוד מקור: 26 שלבים (עם תמונות)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[רובוט ארדואינו] כיצד ליצור רובוט לכידת תנועה - רובוט אגודל - מנוע סרוו - קוד מקור: 26 שלבים (עם תמונות)")
[רובוט ארדואינו] כיצד ליצור רובוט לכידת תנועה | רובוט אגודל | מנוע סרוו | קוד מקור: רובוט אגודל. השתמש בפוטנציומטר של מנוע סרוו MG90S. זה מאוד כיף וקל! הקוד פשוט מאוד. זה בסביבות 30 קווים בלבד. זה נראה כמו לכידת תנועה. אנא השאר כל שאלה או משוב! [הוראה] קוד מקור https: //github.c