
תוכן עניינים:
- מְחַבֵּר John Day day@howwhatproduce.com.
- Public 2024-01-30 09:17.
- שונה לאחרונה 2025-01-23 14:46.

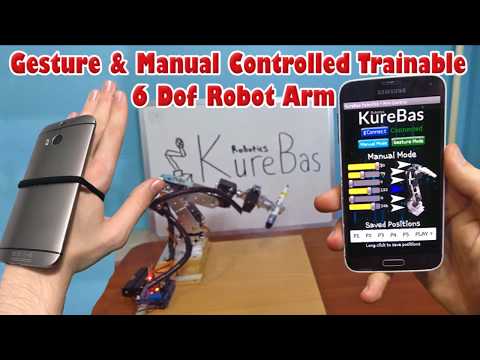
ישנם שני מצבים בזרוע.
ראשית הוא מצב ידני שתוכל להזיז את הזרוע באמצעות Bluetooth בטלפון הנייד שלך על ידי הזזת המחוונים באפליקציה. במקביל, אתה יכול לשמור את העמדות שלך ואתה יכול לשחק …
השני הוא מצב מחווה המשתמש בחיישן הכיוון ובחיישן הקרבה של הטלפון שלך. כאשר הם משתנים, האפליקציה שולחת פקודות ל- arduino …
KureBasArm - זהו שלב נוסף עבור רובוט חדש KureBas v 3.0
שלב 1: חומרים משומשים

סט זרוע רובוטית DOF 35 $
6x MG996r סרוו מתכת 30 $
מגן סרוו 16 ערוצים 9 $
מודול בלוטות 'HC-06 2.50 $
2 סוללות ליתיום 18650 $ 11.50
2x 18650 מחזיק סוללות 2 $
מחיר כולל: 90 $
שלב 2: כיצד להגדיר את הזרוע הרובוטית


שלב 3: קידוד


אתה יכול להגיע לכל הקבצים בקישור הזה (קוד ואפליקציה)
drive.google.com/open?id=1JejPVpk6yYxPe6gNJJ5ALI4ptvwR07aD
שלב 4: יישום טלפוני

הכנתי את האפליקציה ממציא APP MIT 2
מוּמלָץ:
הוק מחווה: רובוט נשלט על ידי מחוות יד באמצעות ממשק מבוסס עיבוד תמונה: 13 שלבים (עם תמונות)
")
הוק מחווה: רובוט נשלט על ידי מחוות יד באמצעות ממשק מבוסס עיבוד תמונה: הוק מחווה הוצג ב- TechEvince 4.0 כממשק פשוט המבוסס על עיבוד תמונה ומכונה. התועלת שלה נעוצה בעובדה שאין צורך בחיישנים נוספים או לבישים למעט כפפה בכדי לשלוט במכונית הרובוטית הפועלת על
כיצד להרכיב זרוע רובוט מעצימה (חלק 3: זרוע רובוט) - מבוססת על המיקרו: BITN: 8 שלבים
 - מבוססת על המיקרו: BITN: 8 שלבים")
כיצד להרכיב זרוע רובוט מעצימה (חלק 3: זרוע רובוט) - מבוססת על המיקרו: BITN: תהליך ההתקנה הבא מבוסס על השלמת מצב המכשולים הימנעות. תהליך ההתקנה בחלק הקודם זהה לתהליך ההתקנה במצב מעקב אחר קווים. אז בואו נסתכל על הצורה הסופית של A
כיצד להרכיב זרוע רובוט מעצימה (חלק 2: רובוט למניעת מכשול) - מבוסס על המיקרו: ביס: 3 שלבים
 - מבוסס על המיקרו: ביס: 3 שלבים")
כיצד להרכיב זרוע רובוט מעצימה (חלק 2: רובוט למניעת מכשול)-מבוסס על המיקרו: ביס: בעבר הצגנו את ארמביט במצב מעקב אחר קווים. לאחר מכן, אנו מציגים כיצד להתקין את ארמביט במניעת מצב מכשולים
כיצד להרכיב זרוע רובוט מעץ מרשים (חלק 1: רובוט למעקב אחר קווים)-מבוסס על המיקרו: ביט: 9 שלבים
-מבוסס על המיקרו: ביט: 9 שלבים")
כיצד להרכיב זרוע רובוט מעץ מרשים (חלק 1: רובוט למעקב אחר קווים)-מבוסס על המיקרו: ביט: לבחור העץ הזה יש שלוש צורות, הוא שונה ומרשים מאוד. אז בואו ניכנס לזה אחד אחד
כיצד להכין מגיני בלוטות 'לסקיצה להעלאה לארדואינו: 9 שלבים (עם תמונות)
")
כיצד להכין מגיני Bluetooth להעלאת סקיצה לארדואינו: אתה יכול להעלות סקיצה לארדואינו מאנדרואיד או מחשב באמצעות בלוטות ', לשם כך אתה צריך רכיב קטן נוסף כגון מודול בלוטות', קבלים, נגד, לוח זקן וחוטי מגשר ואז אתה מחבר התרוממו יחד והתחברו לסיכת ארדואינו